
The Master of Applied Cybernetics is the flagship program at the School of Cybernetics, an experiment in education that is creating a new type of practitioner for the 21st century. From framing critical questions about cyber-physical systems (CPS), to uncovering new approaches to analyse and intervene throughout the CPS lifecycle, to exercising their skills and knowledge in practice with industry partners – the students spend a year with us, not only grappling with but testing the principles of a new branch of engineering.
The Build course is where the students develop a hands-on understanding of new and emerging technological systems and their components. Through learning by doing, the students complement their existing skillsets – whether they are engineers, computer scientists, artists, lawyers or anthropologists – and gain the mastery required to build and guide teams to safely, sustainably and responsibly develop and manage new and emerging technologies.
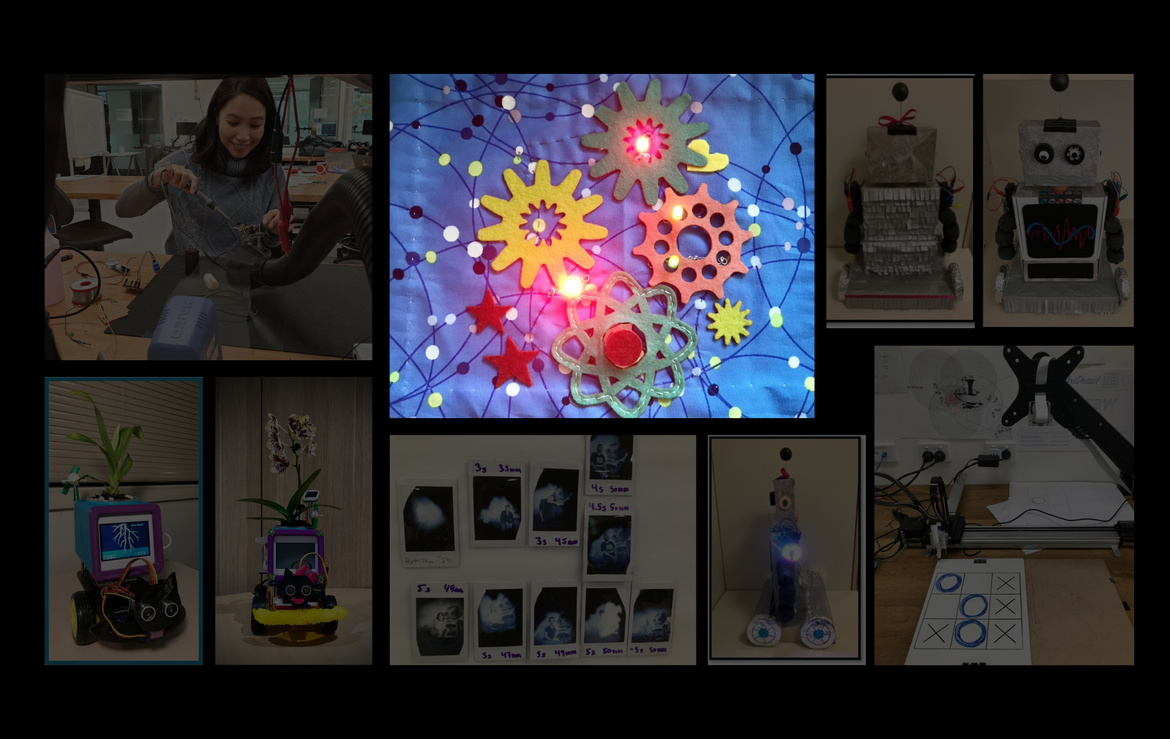
During Build, our students come face to face with a range of machines, gadgets and technical tools in activities designed to equip them with an understanding of technical systems and the fundamental skills they need as practitioners custom-fit for the 21st century.
Without further ado, introducing the many machines of the Master of Applied Cybernetics…
Harry the Plotter#
In the very first week of the Masters program, students were introduced to coding with the help of Harry the Plotter! While some students come from a programming background, for many others this was their first time coding.
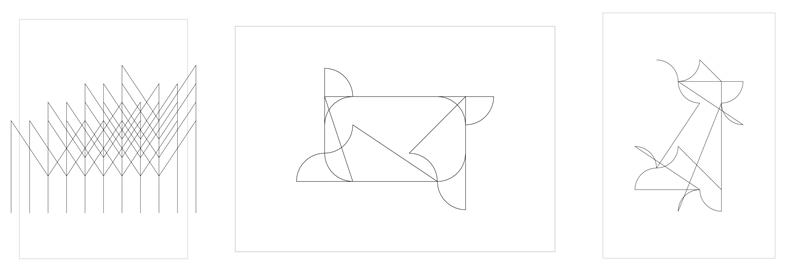
Who or what is Harry the Plotter? Pen plotters are a sort of drawing robots. They ‘print’ by moving a pen across a surface, drawing vector graphics which represent the images as a set of paths that draw lines and curves. The pen plotter offered an interesting lens through which to explore coding and art. The students’ first task: to write a line of code to complete the shape of a letter ‘A’. Yes, learning a new ‘language’ always starts with the alphabet. From there the students put their spatial reasoning to the test, creating art using their new skills in coding. What they produced was nothing short of awesome!
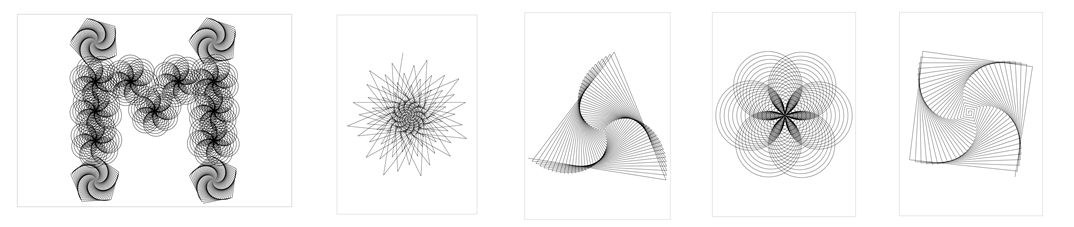
The tasks were designed in a way to guide the students step by step towards a stretch goal while pushing the limits of what the students themselves thought they could achieve. This is a common thread throughout the Master of Applied Cybernetics! It also offered a great introduction to cyber-physical systems, working with software and hardware, and engineering a robot to behave as intended. We learned the hard way that something that works in simulation doesn’t always translate to real life! We even created the Harry the Plotter hall of fame for all the weird unintended outputs that looked cool (or didn’t) – great art is in the eye of the beholder!
With the basics under their belt, our students went on to explore the concept of algorithms and build on their programming skills to create a tic tac toe agent, and challenge their agent to a game of tic tac toe.
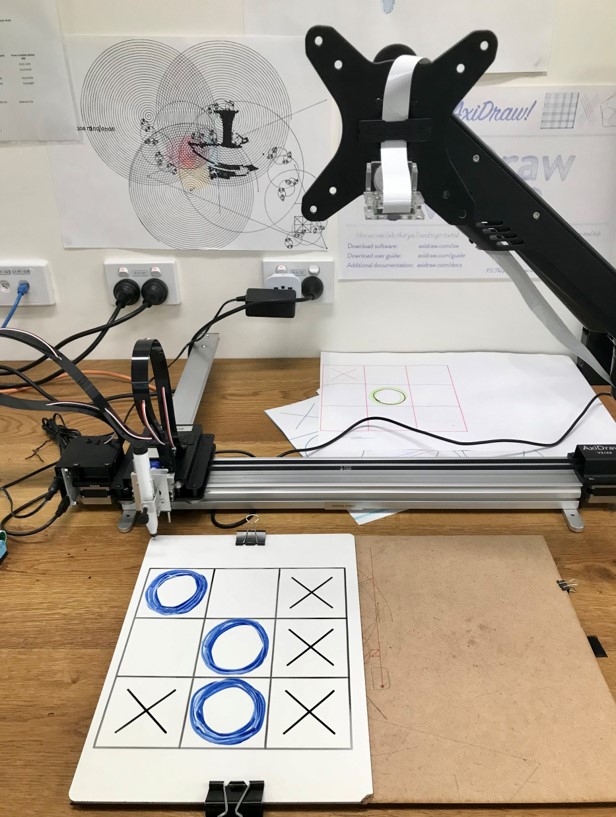
The tic tac toe agent built upon the pen plotter, with the addition of a camera and computer vision system to recognise the symbols played and their location on the playing board. The pen plotter would then make its next move based on the logic of the underlying agent programmed by the students. What did we learn? Well, no system is perfect and some parts of it will inevitably fail. We had to make a lot of accommodations for the machine. For some of the students this was the first time they were exposed to prototype tech, and that is very different in nature and feel to the consumer tech we interact with all the time.
These activities were a first for many of our cohort who had never written code before. Our students approached the challenge with enthusiasm and curiosity, and within weeks were calling themselves ‘coders’ and ‘programmers’ as they excelled on their rapid journey of learning how to write code and translate ideas into machine languages.
Turtlebot#
Students in the Master of Applied Cybernetics come from all kinds of professional backgrounds. Most of them had never interacted with a robot, yet alone programmed one. Students were asked to program a turtlebot to navigate and escape a maze. And they did it, how a-maze-ing is that!

This series of workshops with the turtlebot once again took students on a code journey from idea to strategy to algorithm to pseudocode and code. There were two groups: the iterators and the planners. The iterator had minimal preparation time, but rather tweaked their code to escape the maze by repeatedly running it on the robot, observing the behaviour and improving their code.
The planner had longer preparation time, where they could start with a plan, and think about different ways to tackle the problem. They were also allowed to observe failures of the iterator group and build upon them, but could only run their code once on the robot. To our surprise, the iterator group were the ones who succeeded to guide the robot out of the maze. By constantly trying and failing, and observing how the machine executes their commands – which is never as you expect it would – and calibrating the system, ‘team iterator’ were successful in their mission.
This task allowed students to understand and achieve complex behaviour through simple commands. Using only one sensor, i.e. to detect if the turtlebot bumped into something, and writing a simple algorithm to guide the movement of the bot based on the sensor input, they could get a robot to escape a maze on their first ever day of interacting with a robot!
Pinhole Camera#
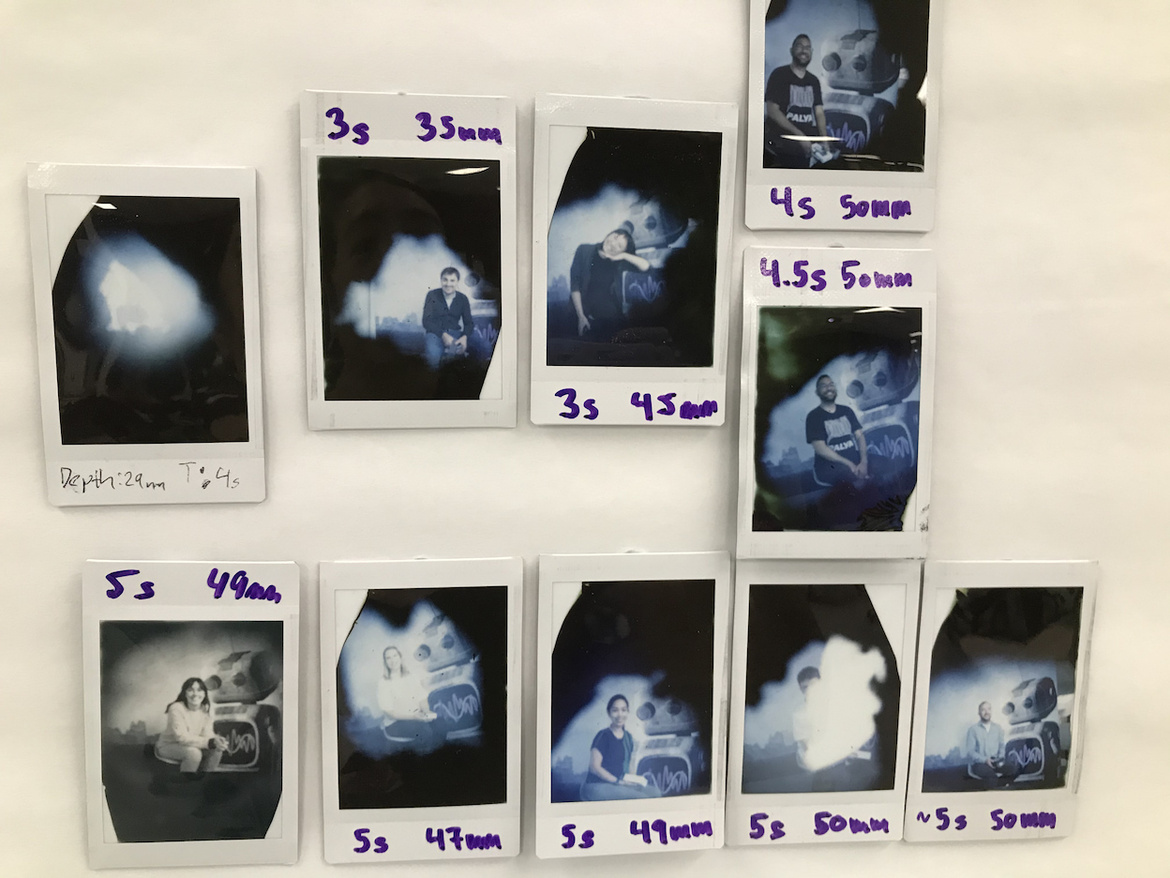
What’s a better way to learn about sensors than creating one yourself? Here, students were asked to create a pinhole camera, remember this from primary school?

Taking students through the steps of building a pinhole camera – including sourcing the right box, drilling a square through the box and covering it with aluminum tin to create a shutter, pinching the hole through the tin to create a lens, learning about the physics of photography, measuring the focal length, etc. – gave the students experience with the full process of making a sensor, and explored the role of human influence on sensor behavior.
Through the process, students not only learned about cameras and sensors, but also the black box theory. You don’t need to know about the mechanics of a car or how the power is transmitted through a crankshaft to be able to drive a car, or learn about the forces acting on a bicycle to be able to ride one, but these are systems we use and interact with every day. We typically interact with systems only through inputs and outputs and that’s how we build our understanding of how these systems work and behave.
With thanks to Myrna Kennedy – 2021 Masters student for the photographs.